サービスマップでサービス間の依存関係を表示する 🔗
サービスマップには、APMのインストルメント済みサービスおよび推定サービス間の依存関係と接続が表示されます。このマップは、時間範囲、環境、ワークフロー、サービス、タグのフィルターの選択に基づいて動的に生成されます。サービスマップを使用して、依存関係、パフォーマンスのボトルネック、エラーの伝播を特定できます。
サービスマップに関わる詳細なシナリオについては、シナリオ:KaiがSplunk APMのサービスマップを使用してエラーの根本原因を調査する を参照してください。
APMにおける推定サービスの詳細については、推定サービスのパフォーマンスを分析する を参照してください。
次のスクリーンショットは、サービスマップの例です:
![Splunk APMの[サービスマップ]のサービスマップの例。](../../_images/service-map-updated-view1.png)
サービスマップにアクセスする 🔗
以下の手順でSplunk APMのサービスマップにアクセスします:
Splunk Observability Cloud にログインします。
ナビゲーションバーで APM を選択します。
APMのランディングページで Service Map を選択します。サービスマップビューが開き、中央にサービスマップが表示されます。
(オプション) Switch to Classic Service Map を選択すると、横方向のサービスマップレイアウトに切り替わります。デフォルトのコンステレーションビューは、環境を拡大表示し、サービスパフォーマンスをすばやく評価するのに役立ちます。
サービスマップを使用して、以下のことができます:
ノードまたはエッジにカーソルを合わせると、そのノードまたはエッジのリクエスト、エラーおよびレイテンシ(RED)メトリクスのポップアップチャートが表示されます。
サービスマップ内の任意のノードを選択すると、そのノードのチャートがサービスパネルに表示されます。
サービスマップ内の任意のノードを選択すると、そのノードと、サービスマップ内で直接の依存関係があるノードが切り離されます。
Breakdown セレクターを使用すると、サービスのアクティビティを、インデックス化されたスパンタグごとに分割します。詳細は サービスマップの分解を実行する を参照してください。
このビューで任意のチャートを選択すると、そのチャートのパラメータに一致するトレースの例が表示されます。
また、監視やトラブルシューティングのシナリオの出発点としてサービスマップを使用することもできます:
サービスに関してリアルタイムで監視のインサイトを得るには、サイドパネルで View Dashboard を選択し、内蔵のサービスダッシュボードを表示します。詳細は Splunk APMのダッシュボードを使用してサービスパフォーマンスを追跡する を参照してください。
より広範なトラブルシューティングを行うには、サイドパネルの Tag Spotlight タブを選択し、Tag Spotlightを開きます。詳細は Tag Spotlightを使用してサービスパフォーマンスを分析する を参照してください。
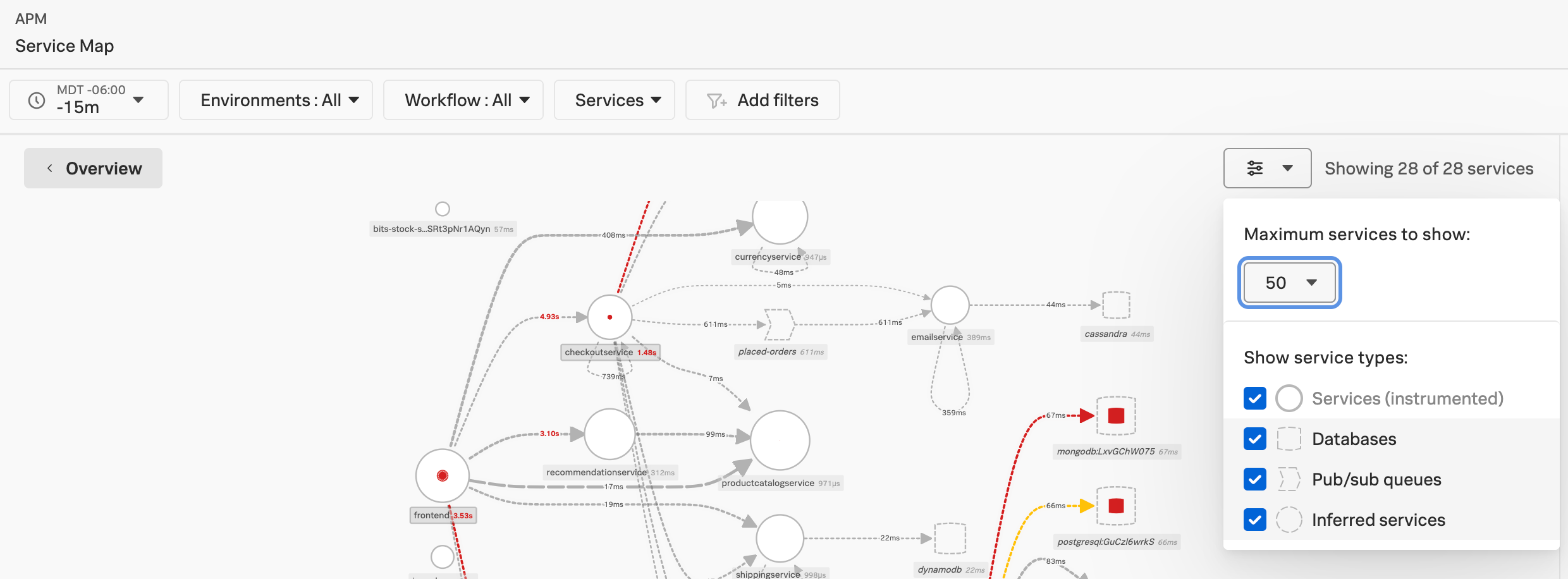
サービスマップをフィルタリングする 🔗
フィルターメニューを選択すると、サービスマップに表示されるサービスの最大数とタイプを変更できます。サービスマップには、デフォルトではすべてのサービスタイプが表示されます。また、最大数のデフォルトは50サービスです。
サービスマップの分解を実行する 🔗
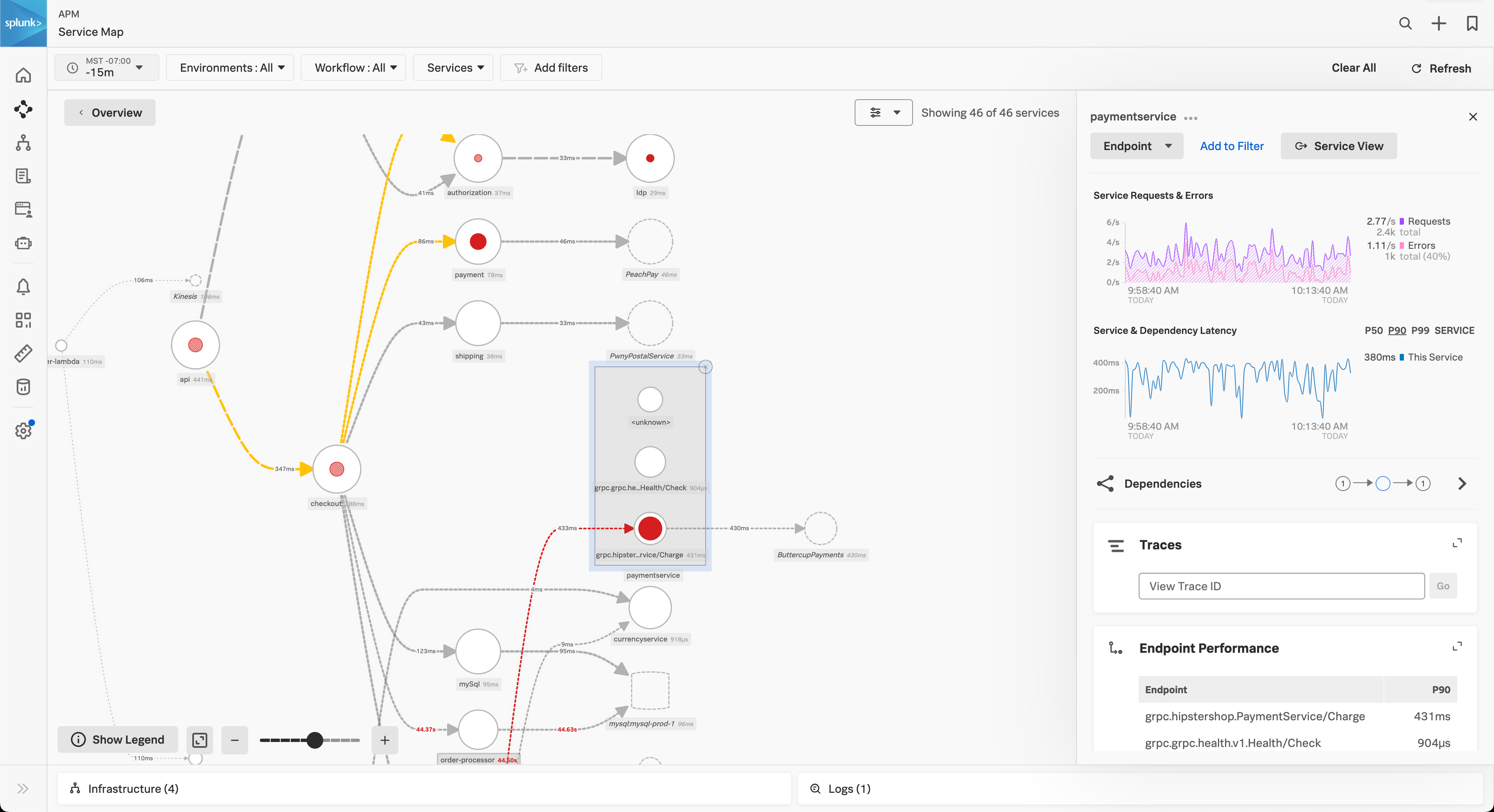
次のスクリーンショットは、paymentservice ノードをエンドポイント別に分解したサービスマップの例で、決済サービスのエラーが /Charge エンドポイントで発生していることを示しています。
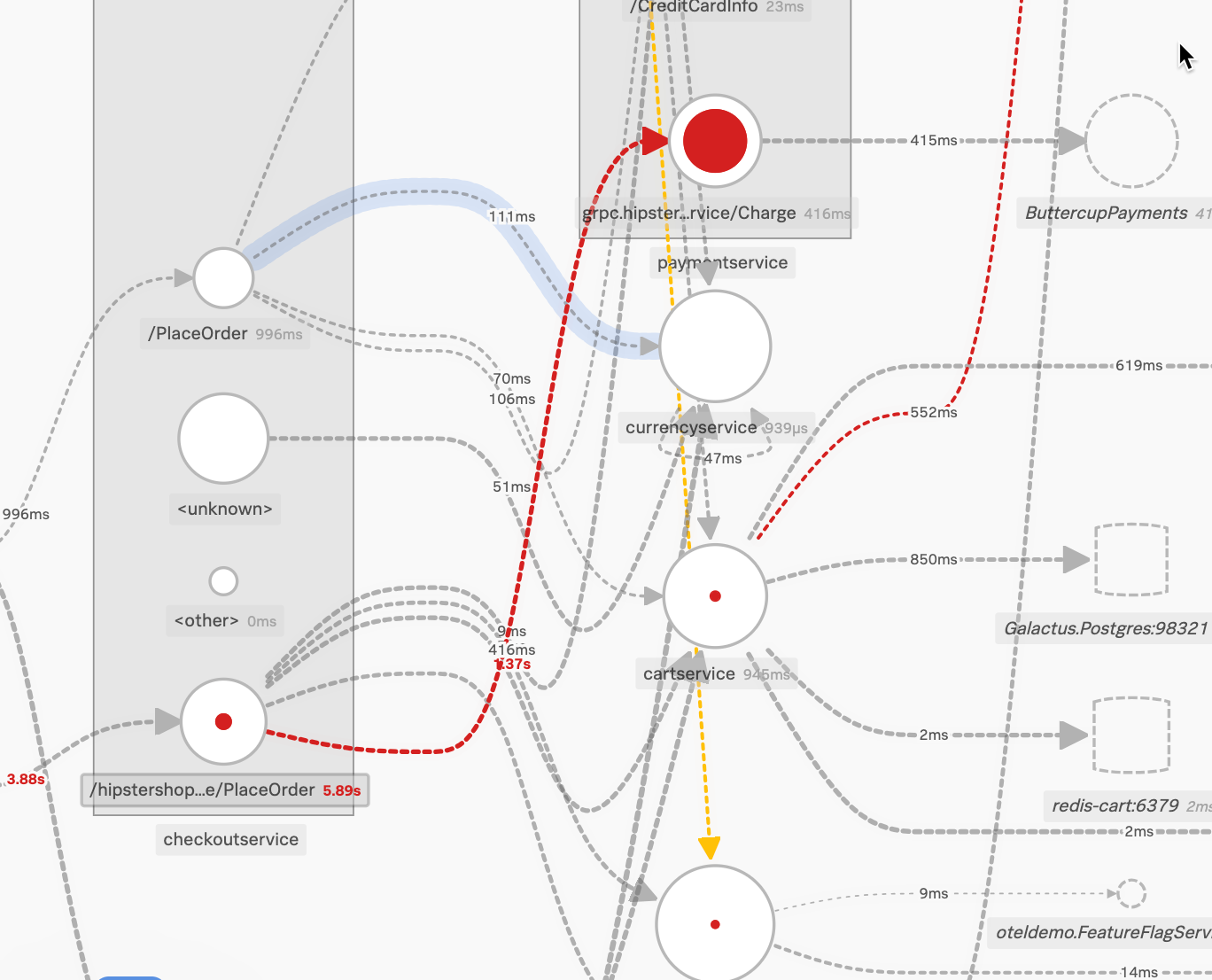
次のスクリーンショットは、同じサービスマップで checkoutservice をさらにエンドポイント別に分解したものを示しています。これを見ると、/Charge の paymentservice エンドポイントで発生しているエラーが、/placeOrder の checkoutservice エンドポイントから生じているものであることが分かります。
サービスマップを分解するには、以下の手順に従います:
関心のあるサービスを選択します。
サービスタブで、Breakdown を選択し、メニューからオプションを選択します。これにより、選択した特性別にサービスのビューが分割されます。たとえば、Endpoint を選択し、Latency (P90) を選択すると、サービスノードがエンドポイントに分解され、90パーセンタイルのレイテンシで最上位から最下位にランク付けされます。分解した値が5つ以上ある場合、分解結果には上位5つが表示され、残りは <other> というラベルのノードにグループ化されます。
(オプション)分解結果内のノードを選択して、さらに別の特性別に視覚エフェクトを分解できます。
サービスマップの「関連コンテンツ」を設定する 🔗
特定のメタデータを設定して、サービスマップの「関連コンテンツ」を有効化できます。「関連コンテンツ」は、APM、Infrastructure Monitoring、およびLog Observer間のデータを自動的に相関付けて、Splunk Observability Cloud全体にフィルターを渡します。
これを設定すると、「関連コンテンツ」バーでタイルを選択して、Splunk Observability Cloudのあるビューから別のビューにシームレスに移動できます。次のアニメーションは、ユーザーがAPMからInfrastructure Monitoringへ移動する様子を示しています。サービスマップに関連コンテンツを表示するための設定方法は、Splunk Observability Cloudの関連コンテンツ を参照してください。
サービスマップの閾値と制限 🔗
次の表は、サービスマップに適用される閾値と制限を示しています:
説明 |
閾値 |
|---|---|
「リスク」ゾーンのエラー率、黄色で表示 |
5% |
「クリティカル」ゾーンのエラー率、赤色で表示 |
20% |
「クリティカル」ゾーンのP90レイテンシ、赤色で表示 |
1秒 |
サービスマップに表示されるノードのデフォルトの最大数。マップ上のフィルターメニューを使用して、表示するサービスの最大数を変更します。 |
50サービスノード |
サービスマップに一度に表示できるノードの最大数 |
200サービスノード |
サービス名およびオペレーション名の文字数制限 |
1024文字 |